
 装置の概要:
装置の概要:
3次元運動を高速・高精度に計測する.
キーワード:3次元位置計測,モーションキャプチャ
装置の型:OPTOTRAK 3020, Northern Digital Inc.(2台)
主な仕様
1)計測点数:最大256点の同時計測
2)サンプリング周波数:
600[Hz](3Dデータ),
3500[Hz](未加工データ)
3)分解能:0.01[mm]以下
4)誤差:0.1[mm]以下
5)ODAU II (オプション) アナログデータの計測
 装置の概要:
装置の概要:
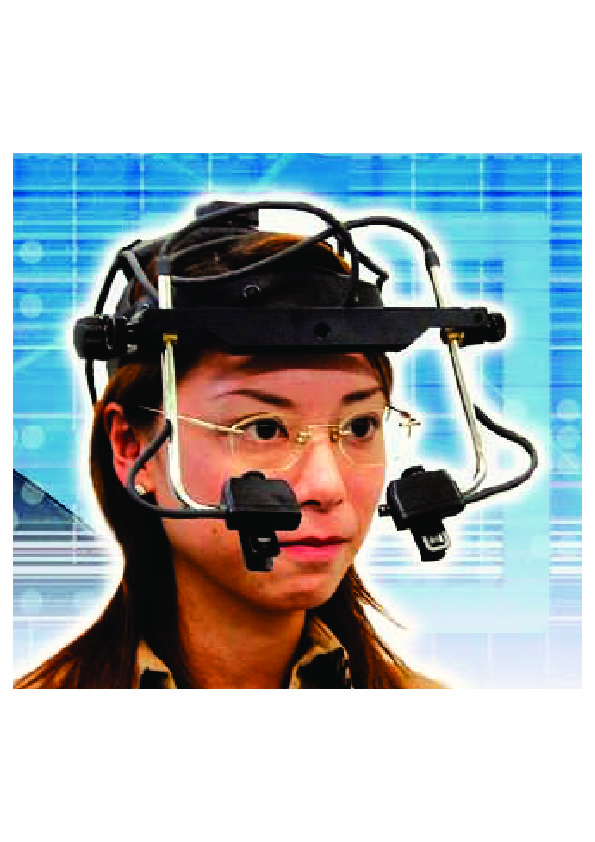
両眼の視線を高速に計測する.
キーワード:視線計測,眼球運動計測
装置の型:EyeLink II, SR Research Ltd.
主な仕様
1)計測:両眼の視線を同時計測
2)サンプリング周波数:
250[Hz](角膜反射計測モード),
500[Hz](瞳孔計測モード)
3)注視点誤差:0.5度以下
4)解像度:0.005度以下(角膜反射計測モード),0.01度以下(瞳孔計測モード)
5)眼球追跡範囲:水平方向:-30度〜30度,垂直方向:-20度〜20度
6)ヘッドトラッキング範囲:40cm〜140cm(標準)
 装置の概要:
装置の概要:
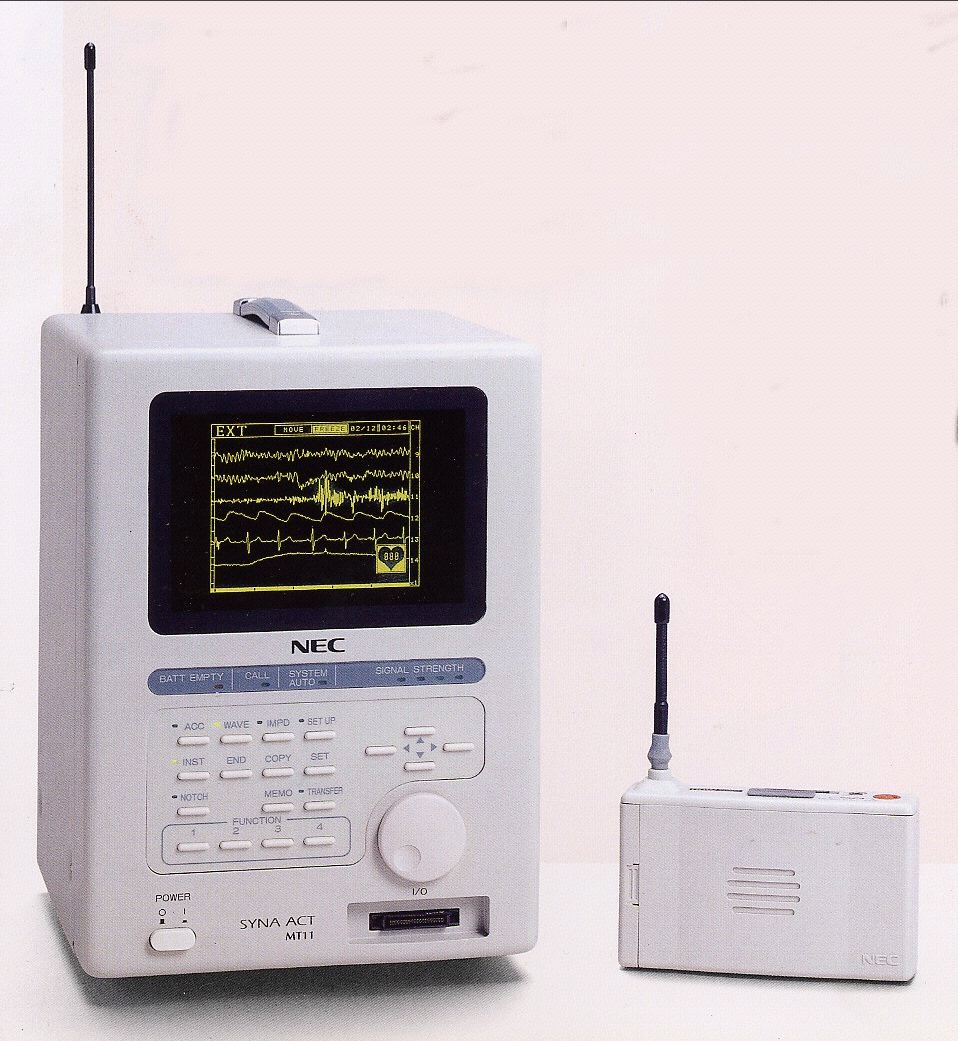
筋電信号をワイヤレスで計測できる
キーワード:筋電信号,無線
装置の型:SYNA ACT MT11, NEC三栄
主な仕様
1)チャネル数:14
2)周波数特性:0.1〜200[Hz]
3)波形モニタ
4)無線による計測
 装置の概要:
装置の概要:
各種の生体信号をワイヤレスで計測できる
キーワード:筋電図,脳波,皮膚電位反応,fNIRS,心電図,呼吸,加速度,圧力,など
装置の型:Biosignalsplux: 3セット(Hybrid-8, Professional, Researcher)
主な仕様
1)チャネル数:最大24ch
2)アクティブ電極を使用
3)様々な生体信号の計測が可能
4)無線(Bluetooth)による送受信(ノイズ対策:信号間は絶縁)
 装置の概要:
装置の概要:
運動中の手形状を計測できる.
キーワード:手運動計測,手形状計測,位置計測
装置の型:CyberGlove, Virtual Technologies Inc.
主な仕様
1)手形状計測(右手用,左手用)
センサ数:22個(22個の関節角)
サンプリング周波数:100[Hz]
精度:0.5[deg.]
2)位置計測 (FASTRAK)下記参照
 装置の概要:
装置の概要:
磁気センサーにより運動を計測する
キーワード:3次元運動計測
装置の型:FASTRAK, POLHEMUS Inc.
主な仕様
三次元の位置座標と三方向の角度
1)精度(RMS):位置0.76mm / 角度0.15度
2)分解能:位置0.005mm / 角度0.025度
3)測定範囲:メーカー精度保証範囲 半径約76cmの半球内
4)最大測定範囲約300cmの半球内
5)インターフェース:RS232
6)サンプリング周波数:1レシーバで最大120[Hz]
7)4レシーバーまで同時計測可能(最大サンプリング周波数=120/レジーバーの個数)
 装置の概要:
装置の概要:
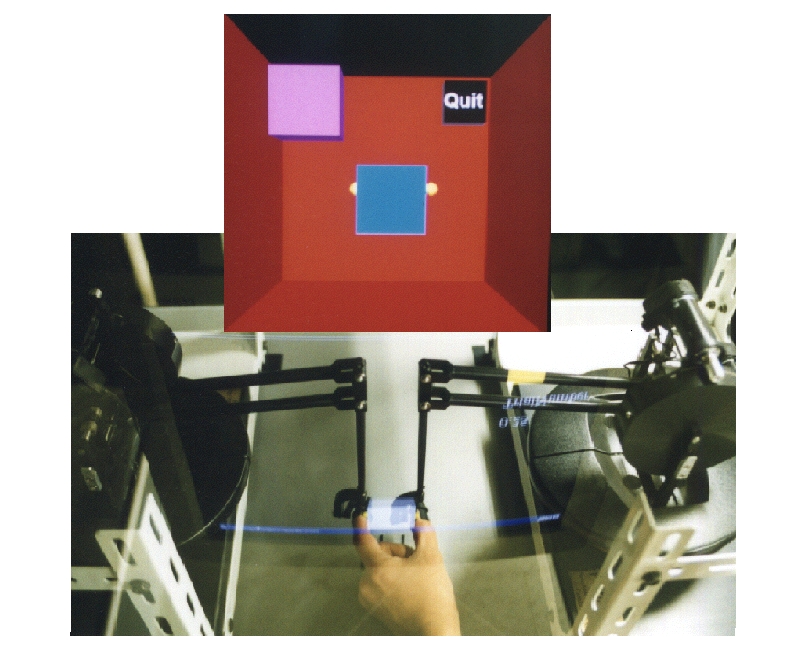
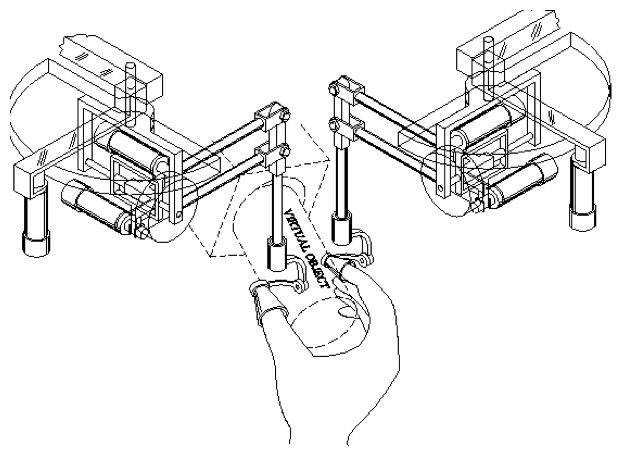
小型ロボットアームにより指先に力を与えることができる.
対象物を実際に持っていなくても持っているかのように感じる.
キーワード:小型ロボット,力覚提示,手運動計測
装置の型:PHANToM 151AG (2台), SensAble Technologies, Inc.
主な仕様
1)最大力:8.5[N]
2)バックドライブフリクション:0.04[N]
3)サンプリング周波数:1000[Hz]
4)位置分解能:0.03[mm]
5)エンコーダ付き指サック(オプション)指先の位置と方向の計測
 装置の概要:
装置の概要:
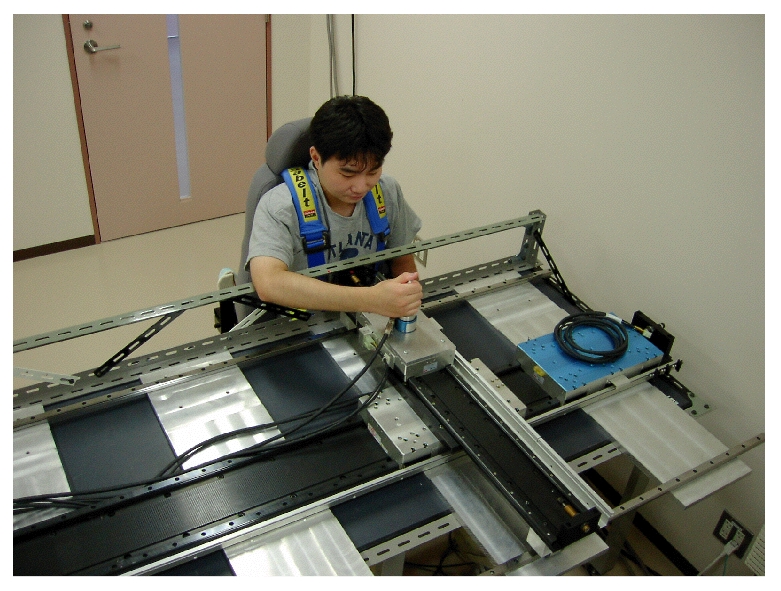
手先の運動を計測する.
運動中の手先に負荷力を与えることができる.
運動中の手先力を計測することができる.
キーワード:腕運動,運動計測,インピーダンス計測
装置の型:スライドモータ(YA2,YB3),NSK
主な仕様
1)最大推力:200[N](YA2),600[N](YB3)
2)繰り返し位置決め精度:1[μm]
3)最大速度:1800[mm/s]
 装置の概要:
装置の概要:
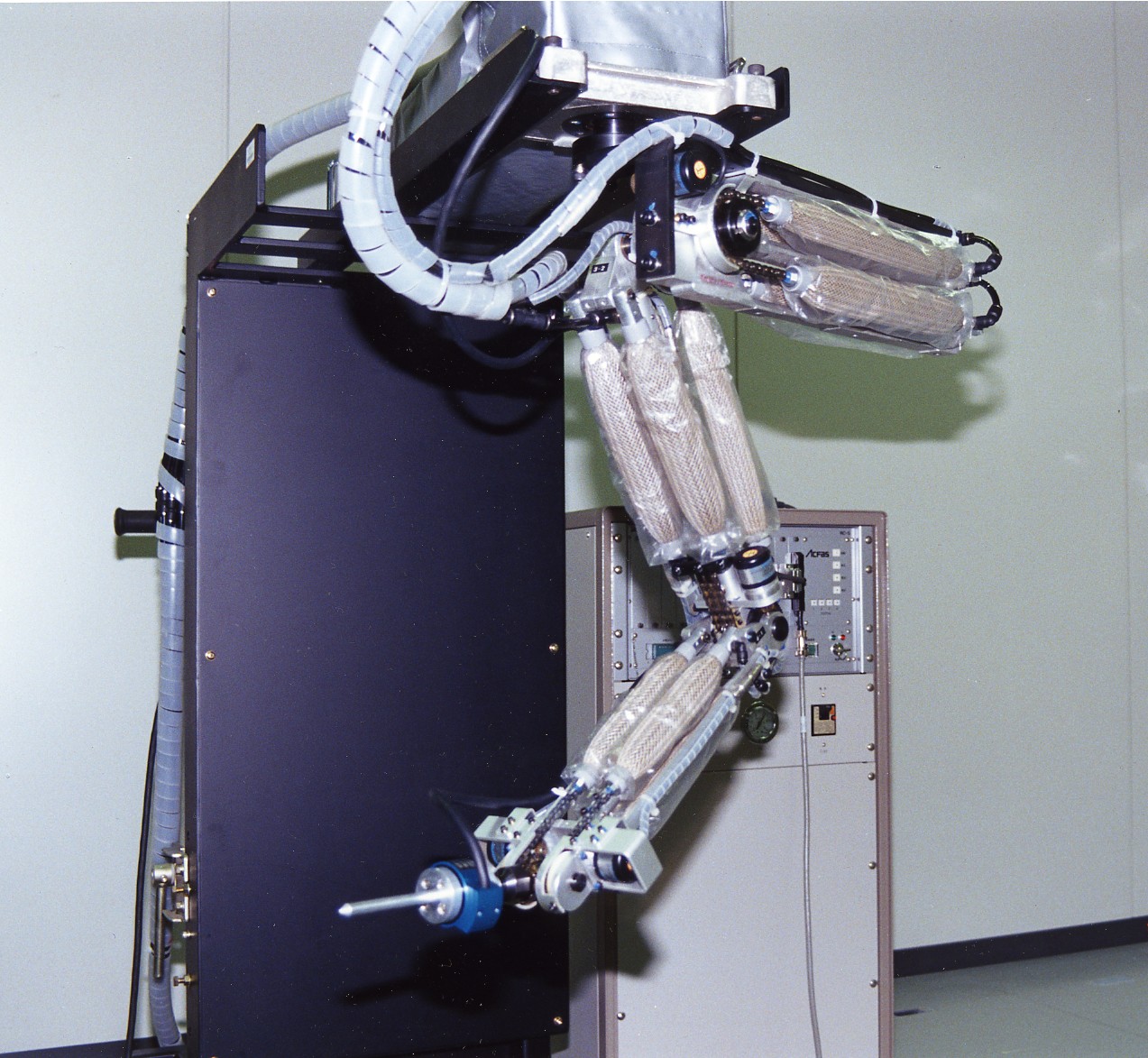
空気圧駆動の人工筋をもつロボットアーム
キーワード:ロボットアーム,人工筋,空気圧駆動,可変粘弾性
装置の型:ラバチュエータ・ソフトアーム,ブリヂストン
主な仕様
1)自由度:5
2)人工筋数:16個
3)空気圧駆動のゴム製の人工筋
4)空気圧により粘弾性が可変
 装置の概要:
装置の概要:
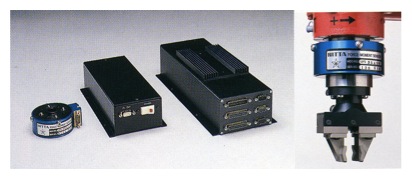
6軸の力覚センサ
装置の型:UFS-2012A-15 (NITTA) (2セット)
主な仕様
1)6軸力覚センサ
2)力Fx,Fy:6[kgf],Fz: 12[kgf]
3)トルクMx,My,Mz:30[kgf・cm]
4)分解能:定格値の1/2000,精度:定格値の0.2%
5)許容過負荷:定格値の500%
6)外形:外径54[mm], 高さ31.8[mm],重量180[g]
 装置の概要:
装置の概要:
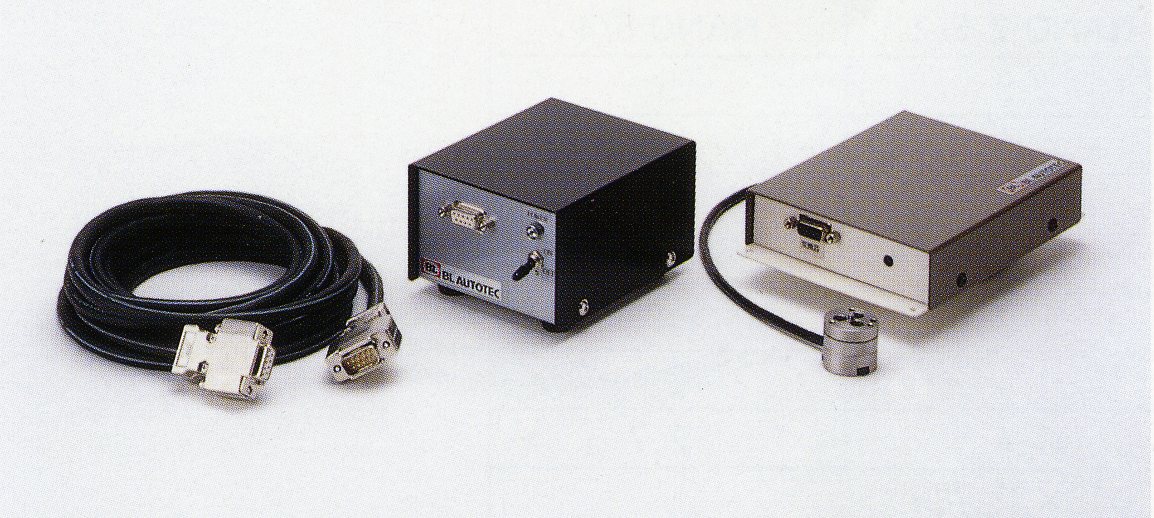
小型の6軸力覚センサ
装置の型:ビーエル・MICROセンサ MICRO5/50(BL Autotec)
主な仕様
1)小型6軸力覚センサ
2)力Fx,Fy,Fz:5[kgf],
3)トルクMx,My,Mz:50[kgf・cm]
4)分解能:Fx,Fy:5[gf], Fz:15[gf],Mx,My,Mz:25[gf-cm]
5)外形:外径25[mm], 高さ22[mm],重量150[g](ケーブル含む)
 装置の概要:
装置の概要:
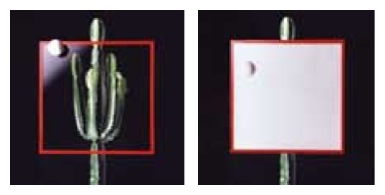
透明と不透明を切り替える
装置の型:UMUガラス(日本板硝子)
主な仕様
1)電源の ON/OFF により透明/不透明を切り換えることができる
2)応答時間
不透視から透視の応答時間: 0.34[ms], 0.78[ms](高遮蔽)
透視から不透視の応答時間: 15[ms], 6[ms] (高遮蔽)
3)透過率
透明の透過率:74%, 不透明の透過率5%, 1%(高遮蔽)
 装置の概要:
装置の概要:
被験者の疲労を低減し,被験者の身体を固定するためのイス
装置の型:特注(シート部はレカロ製)
主な仕様
1)前後,高さ,背もたれの角度,ランバーサポートなどを調節可能
2)4点式シートベルト
3)イス部の固定
 装置の概要:
装置の概要:
被験者の頭部を固定
装置の型:TKK930A アゴ台,竹井機器工業株式会社
主な仕様
1)