[ Top ]
[ English ]
[ 研究 ]
[ 応用 ]
[ 装置 ]
[ 講義 ]
[ スタッフ ]
[ 研究室専用 ]
[ 連絡先 ]
|
【Research】
English
《研究》
人の研究は21世紀の重要な研究テーマです.
人には認知や運動などの優れた能力があります.これらの能力は生まれたときから備わっているものではなく,繰り返し学習することにより獲得されます.このため,ロボットができないようなことでも,人は簡単にやってのけるのです.
この優れた能力を計算論的アプローチと心理物理的アプローチから解明することを目指しています.
【研究目標】
私達の研究室では,人の優れた知能を解明するために,運動選択や運動学習のための「計算モデルの構築」を目指す計算論的アプローチ(計算論的神経科学),および人の認知と運動に関する「心理学的計測」による認知科学的アプローチを同時に進めることにより,身体性の観点から人の認知と運動に関する知能メカニズムを解明しています.
- 今後の展望「人に優しい知能システムを目指して」:
- 人の高度な知能,特に認知と運動に関する脳内情報処理メカニズムを理解することができれば,人工知能や知能ロボットの実現に貢献できるでしょう.
さらに,人に優しい(人が操作しやすく,ヒューマン・フレンドリーな)知能システムにも貢献できるでしょう.
【研究テーマ】
- 計算論的アプローチ
- 心理学的アプローチ
- 人工知能
など
【研究紹介】
運動選択メカニズム(計算論的アプローチ):人腕の運動生成(手先軌道と腕姿勢)を説明する計算モデル
コップで水を飲むときを考えてみてください.コップまで手を伸ばす運動は無数にあり,コップのつかみ方も無数にあります.
このように,目的を達成するための運動は無数にあるため,無数にある運動の中から1つの運動を選択する必要があります(運動選択の問題).
この運動選択の問題を脳内でどのように解いているかを明らかにするために,腕運動に関する拘束条件に基づいて最適な運動を選択するための計算モデルに関して研究されています.Flashら(1985)はジャーク最小モデルを提案し,人の手先軌道を見事に再現できることを示しました.しかし,ジャーク最小モデルにおける最適な運動は運動学的に決定されるため,腕の物理パラメータ(手の長さや質量など)が考慮されていません.この観点から,Unoら(1989)とNakanoら(1999)はトルク変化最小モデルを提案し,ジャーク最小モデルが再現できない運動も見事に再現することを示しました.これらは,関節トルクなどの時間変化を最小にする運動を選択するため,滑らか拘束に基づいた計算モデルに分類されます.一方,これらの計算モデルとは異なった観点から,Harrisら(1998)は分散最小モデルを提案し,トルク変化最小モデルと同様に様々な運動が再現できることを示しました.人腕の運動選択の問題は,このような計算論的アプローチによって研究が進められており,研究が成功している分野の1つになっています.
しかし,脳内での運動生成メカニズムとして考えた場合,腕の物理パラメータだけでなく,筋骨格系や筋の性質も考慮している可能性があります.この観点から,Dornayら(1996)は筋張力変化最小モデルを提案しており,Kawato(1992)は運動指令変化最小モデルを提案していますが,これらの計算モデルに関しては十分検証されていません.
さらに,これらの研究では,手先軌道に関する議論が中心であり,運動中の腕姿勢選択の問題についてはほとんど議論されていません.
例えば,和田ら(2005)は,3次元空間内の2関節運動時の手先軌道と腕姿勢についてトルク変化最小モデルの妥当性を評価しています.
しかし,手首関節を含めた3関節運動中の手先軌道と腕姿勢に関しては検証されていません.
以上の観点から,Katayama and Kanaya,2021は,運動中の手先軌道だけでなく腕姿勢に関して,関節角ジャーク最小モデル(Rosenbaum,1995),トルク変化最小モデル(Unoら(1989); Nakanoら(1999)),および我々が提案した筋骨格系を考慮した筋ストレス変化最小モデルを比較した結果,我々の計算モデルが最も手先軌道と腕姿勢を再現しました(金谷&片山 2018; Katayama and Kanaya 2021).
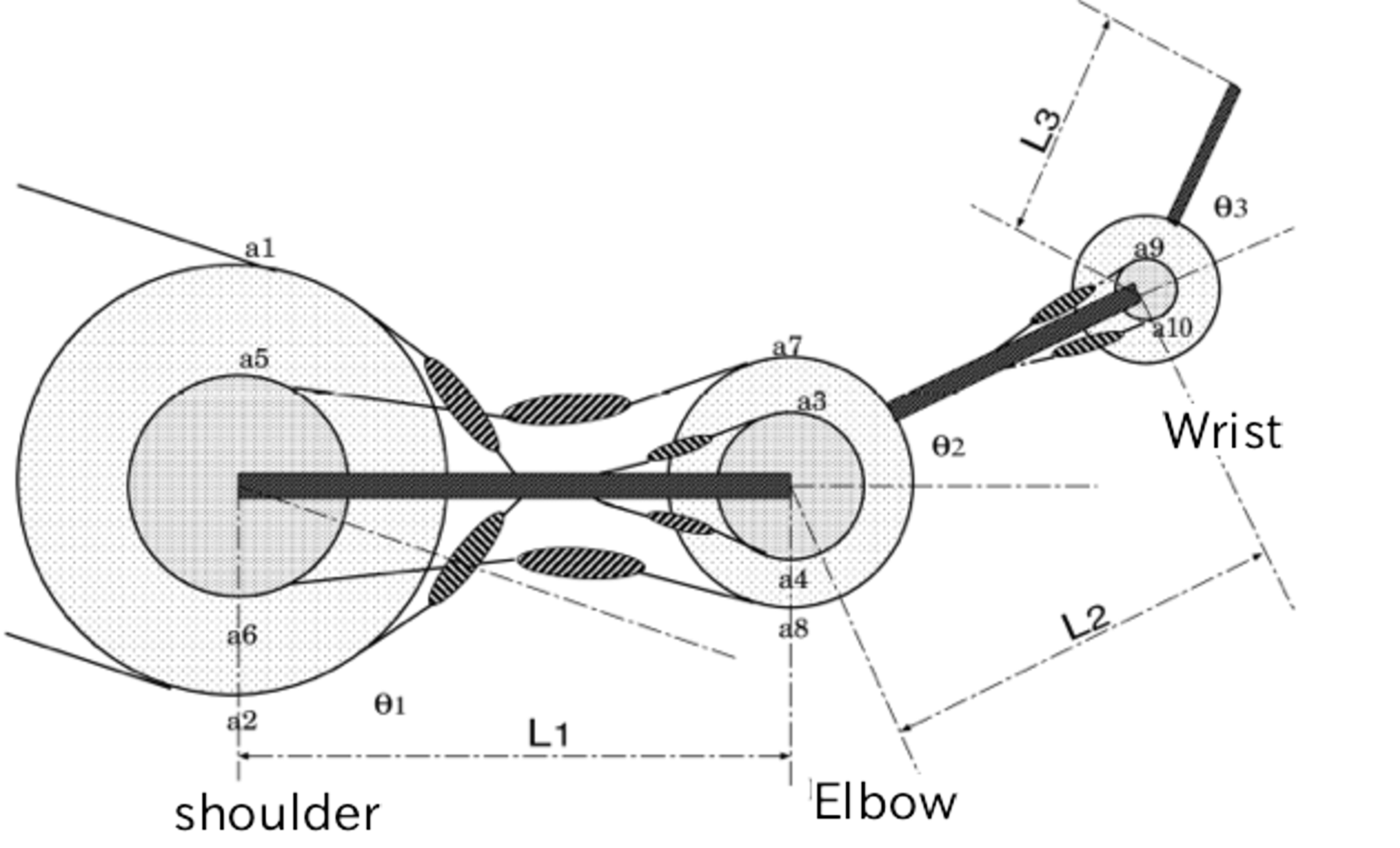
さらに,Katayama(2025)は,人腕を3関節26筋でモデル化し,関節角依存のモーメントアームを用いることによって,計算モデルの妥当性を評価した.
これらの結果は,脳内では,筋ストレス変化最小モデルによって運動を選択していることを示唆しています.
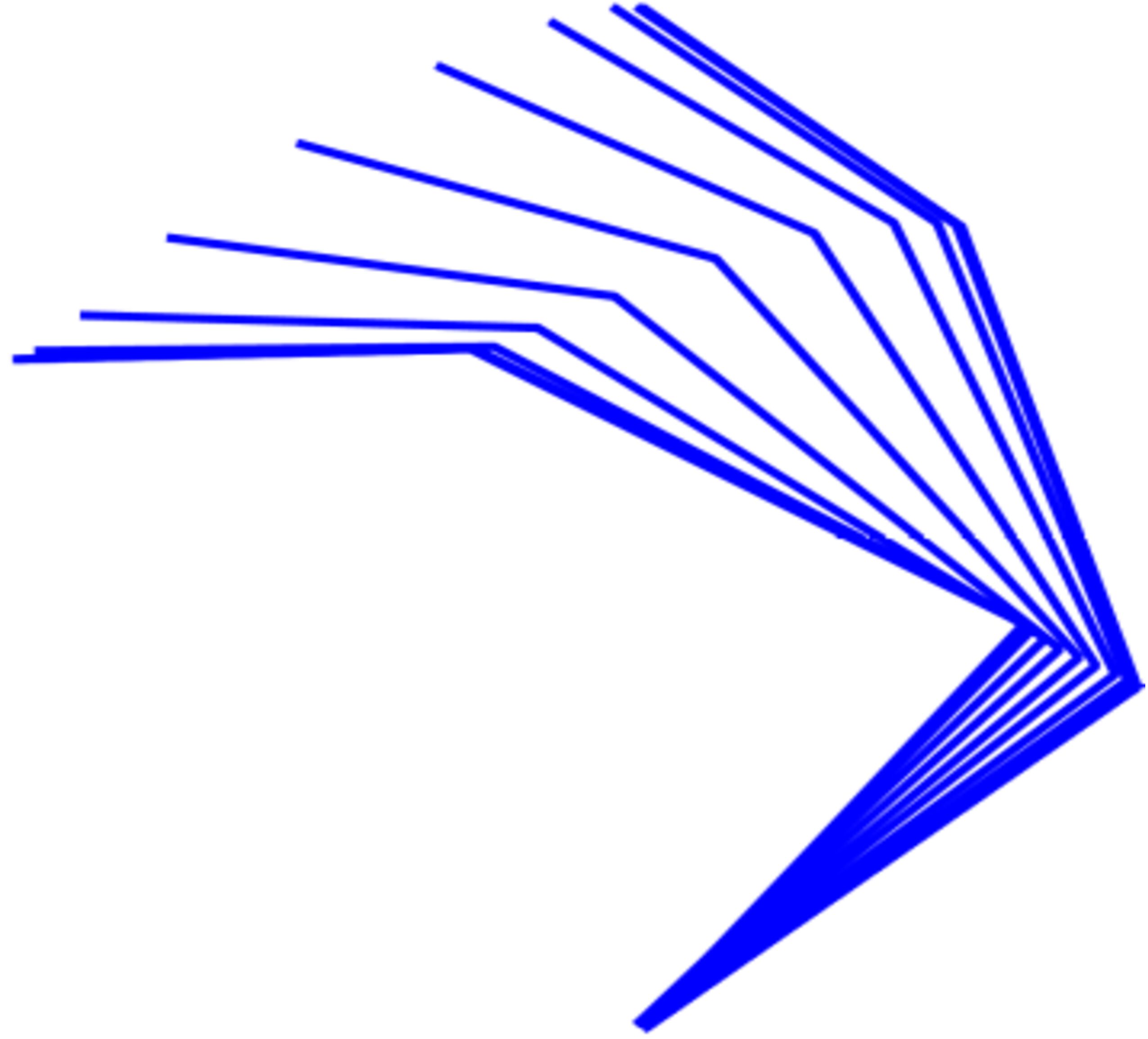
関節角ジャーク最小モデル 関節トルク変化最小モデル 提案した筋ストレス変化最小モデル
(青色:計測した腕運動,赤色:計算モデルによって選択された最適運動)
身体モデルに基づいた道具の認知:道具の認知過程を説明する脳内シミュレーション仮説(我々の仮説)
我々は,見たこともない形のコップであっても,すぐに”コップ”だと分かります.
このような対象物認知に関して古くから様々な研究が成されており,一般的には道具の記憶(道具の概念)との照合によって対象物認知が可能になっています.
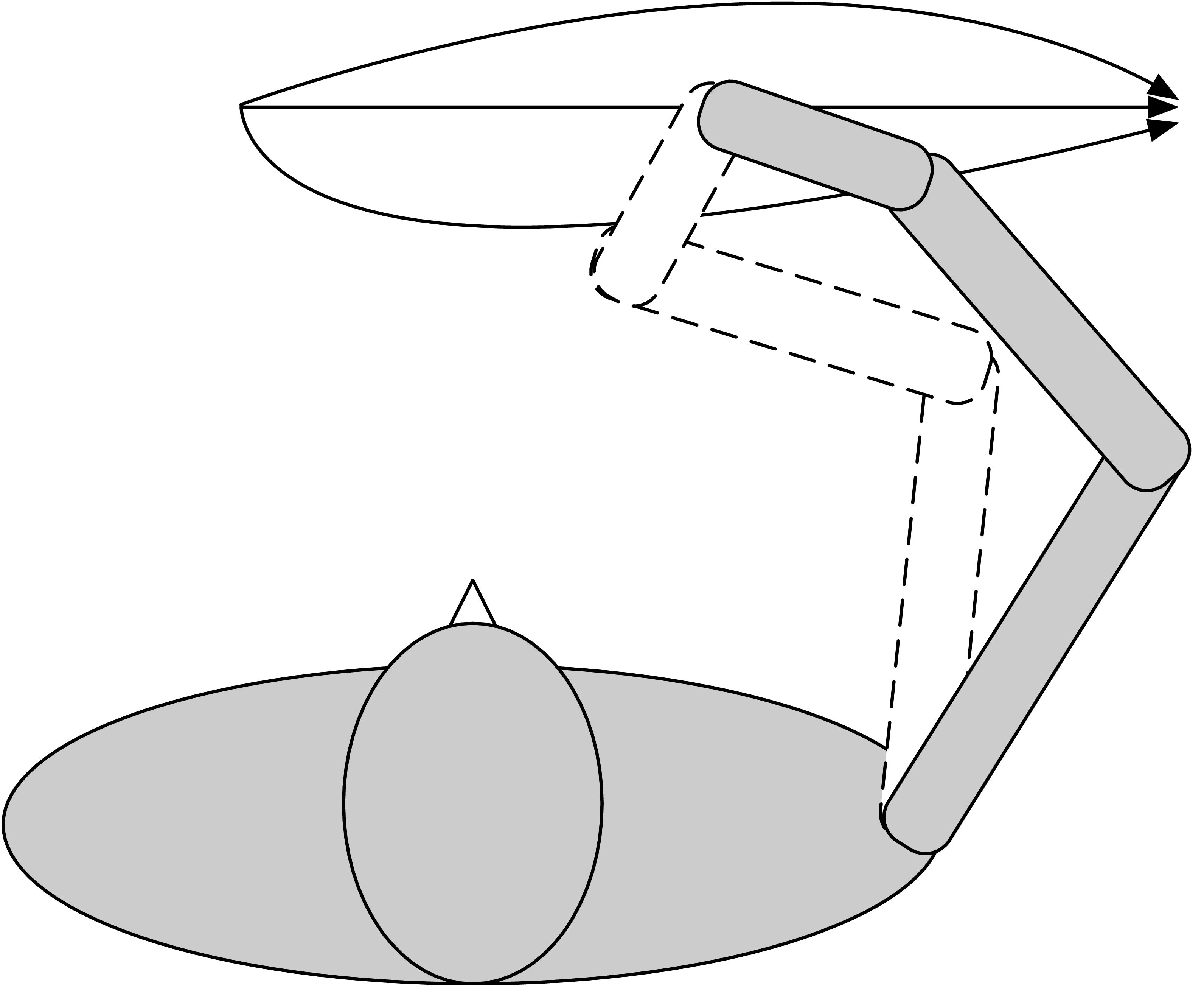
ここで,下図を見てみてください.手が表示されていないときには,大,中,小の3つのコップがあるのが分かります.しかし,大きな手が表示されると,一番小さな物はコップにしては小さすぎて,ミニチュアのコップのように見えるのではないでしょうか.次に,小さな手が表示されたときには,一番大きなコップはコップとしては大きすぎるように見えるのではないでしょうか.このように,コップとして見なすサイズの範囲は身体が基準になっていて,身体が対象物の認知過程と密接に関与しています.つまり,自身の手と比較して,大きすぎるコップや小さすぎるコップは「コップ」とは見なさないでしょう.
また,小さな手の子供と大きな手の成人では「コップらしい」と判断するサイズが異なるのではないでしょうか.

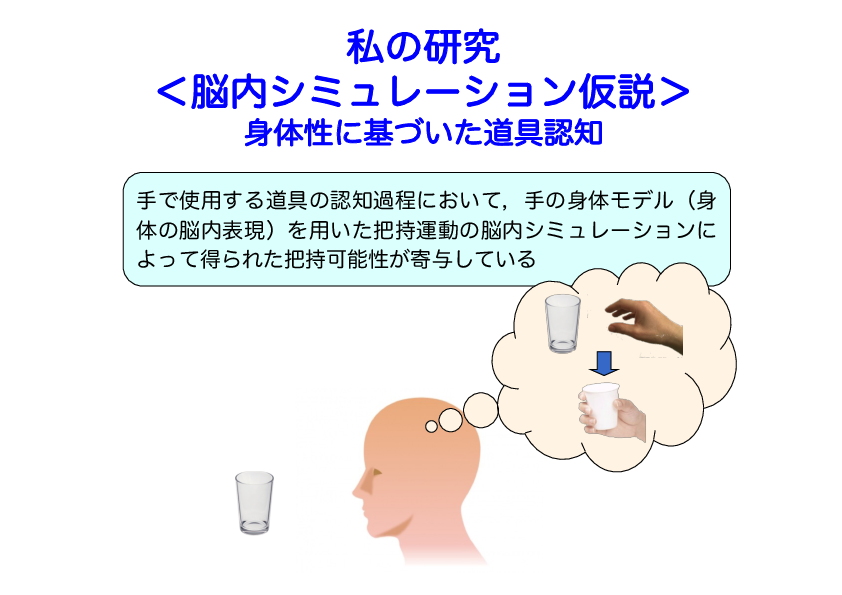
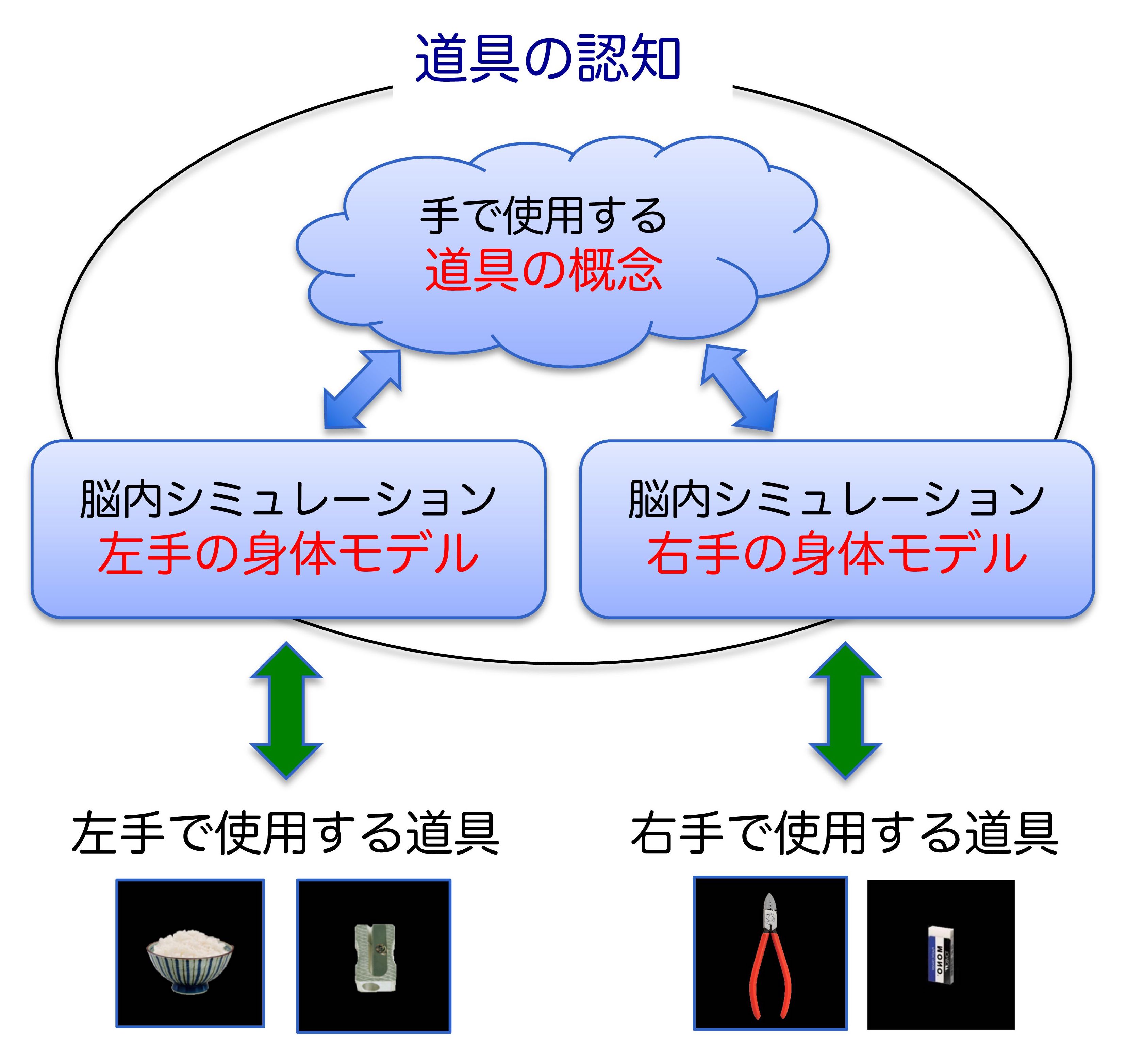
この観点から,我々は「手で使用する道具の認知過程において,手の身体モデル(身体の脳内表現)を用いた把持運動の脳内シミュレーションによって得られた把持可能性が寄与している」の仮説を提案しています.
この仮説では,コップを把持して水を飲むことができれば「コップ」であると判断することになります.しかし,小さすぎたり,大きすぎたり,つかみにくい,水を飲みにくいときには「コップ」とは見なさない,と言うことになります.
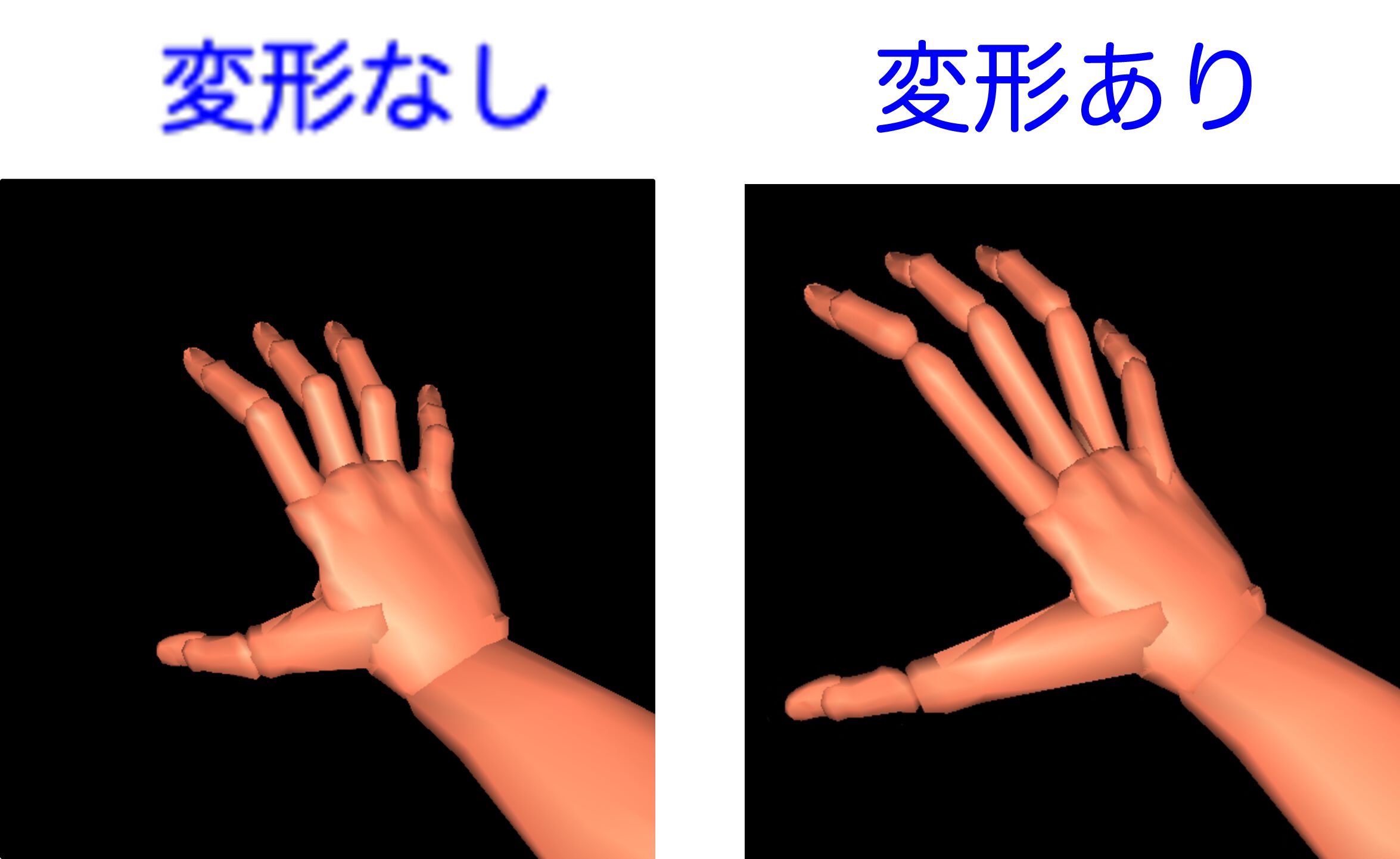
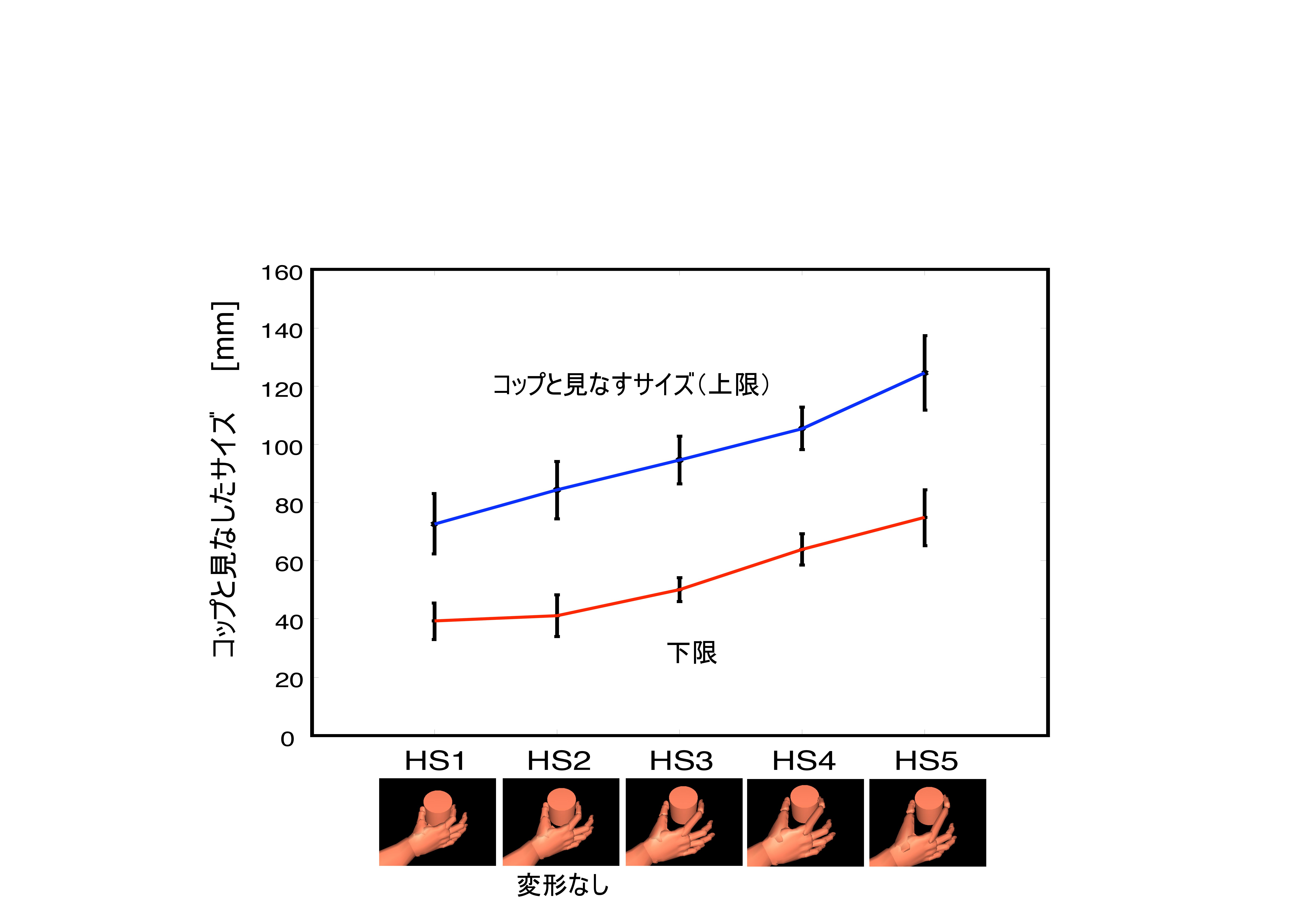
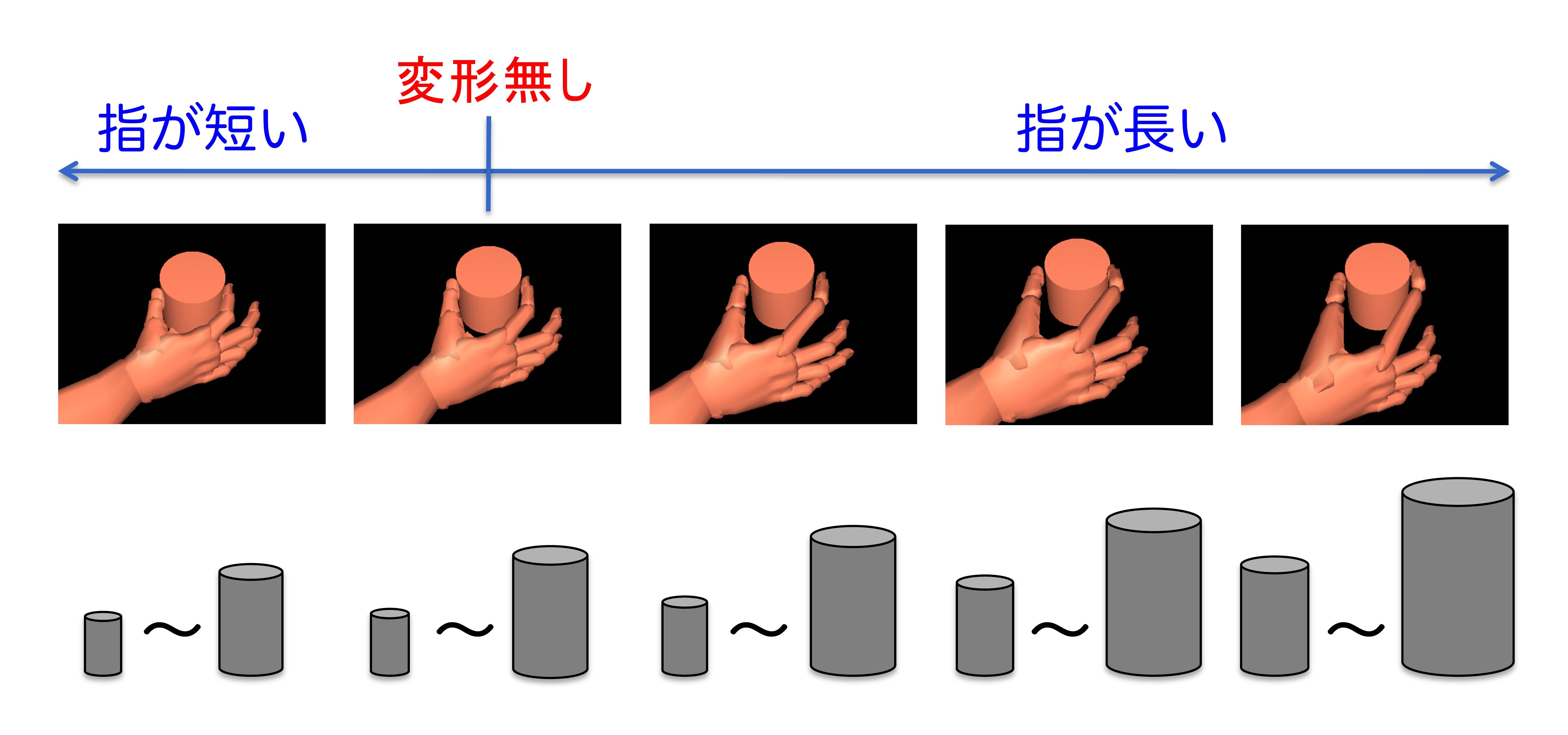
この仮説の妥当性を検証するための実験パラダイムを構築しました.この実験パラダイムでは,VR内に表示した仮想手を幾何学的に変形し,この手を見ながら動かすことによって,この変形に対応した身体モデル(脳内の身体表現)を一時的に書き換えることができます.この仮説が正しいなら,より大きな物が把持できるように指の長さを変形した場合,通常より大きなサイズの物を「コップ」と見なすように変化するはずです.
実験を行った結果,予想通りに,より大きな物を「コップ」と見なすように変化しました.この結果は我々の仮説の妥当性を支持しています.
さらに,この仮説が正しいなら,より大きな物が把持できるように変形した右手の身体モデルを学習したとき,右手で使用する道具では,より大きな物をその道具と見なすように変化しますが,左手で使用する道具では変化しないはずです.
一方,変形した左手の身体モデルを学習したときには逆の傾向になるはずです.この観点から,仮説の妥当性を検証したところ,上記の予測通りの結果となりました.この結果は,我々の仮説の妥当性を支持しています(Katayama and Akimaru,2016,2017).
現在でも様々な観点から我々の仮説の妥当性を検証するための研究を進めています.

身体モデルの学習と身体意識の関係
研究について説明する前に,まずゴム手錯覚(Botvinickら,1998)について説明します.
自己の手が見えない状態で,人工の手(ゴム製の手)を見ているとき,
人工の手と自己の手への同期した視触覚刺激を数分間与え続けると,人工の手があたかも自己の手であるかのように感じるようになります.この錯覚がゴム手錯覚と呼ばれています.
この錯覚が報告されてから,身体意識に関して世界中で研究されています.
このような身体意識は「この運動を引き起こしているのは自分自身である」という運動主体感と「この身体は自分のものである」という身体所有感に分類されます(Gallagher, 2000).
つまり,ゴム手錯覚は身体所有感の錯覚です.
このゴム手錯覚について様々な条件で調べられており(Tsakirisら,2005など多数).
最近ではVR空間内の仮想身体に対する身体意識についても調べられています(Slaterら,2008など多数).
これらの錯覚について様々な条件で調べられており,
身体意識の成立には,感覚情報(視覚や体性感覚など)と運動指令の遠心性コピーの時間的同期性,自己身体と人工/仮想身体との空間的一致性が重要であることが分かっています.
上記の我々の研究において,手の仮想身体(手のCG)を仮想空間に提示していますので,この仮想身体に対する身体意識と身体モデルの学習との関係を調べています.
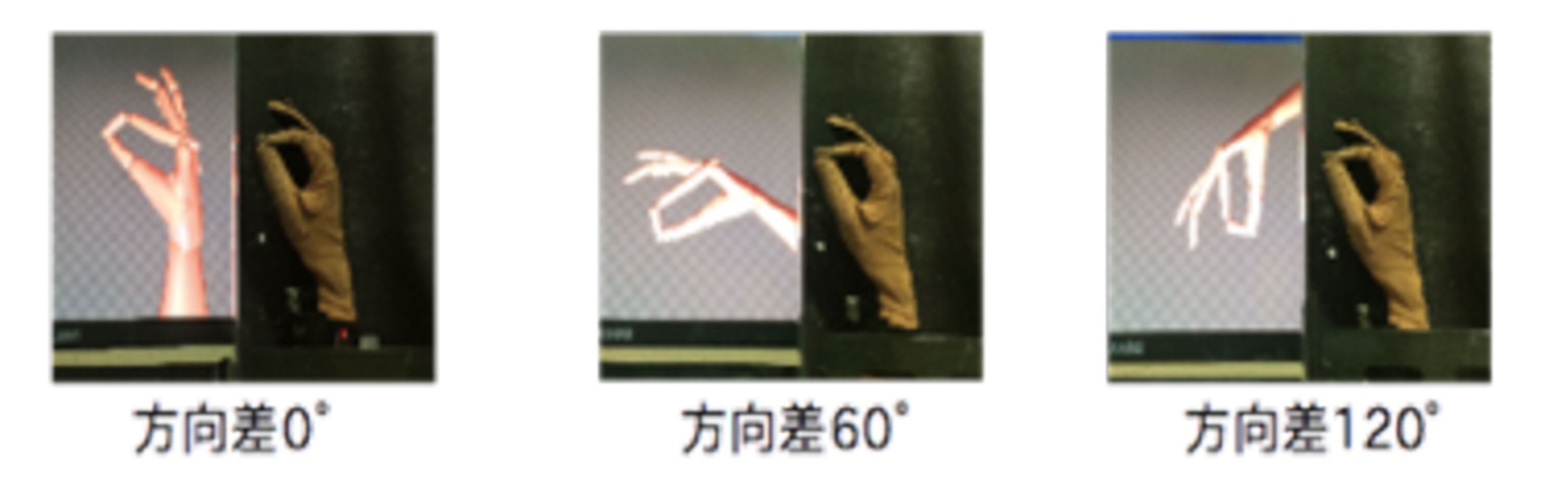
まず最初の実験では,下図のようにVR内の仮想手を被験者の手と異なる方向に表示したとき,この角度差が大きくなるにつれて,仮想手に対する身体所有感が低下しました.身体所有感が高い場合には,最大指先幅(MGA)と最大把持サイズ(MGS)は手の変形に対応して変化しましたが,身体所有感が低い場合には変化しませんでした.
また,道具と見なすサイズに関しても,身体所有感が高い場合には変化しましたが,身体所有感が低い場合には変化しませんでした.
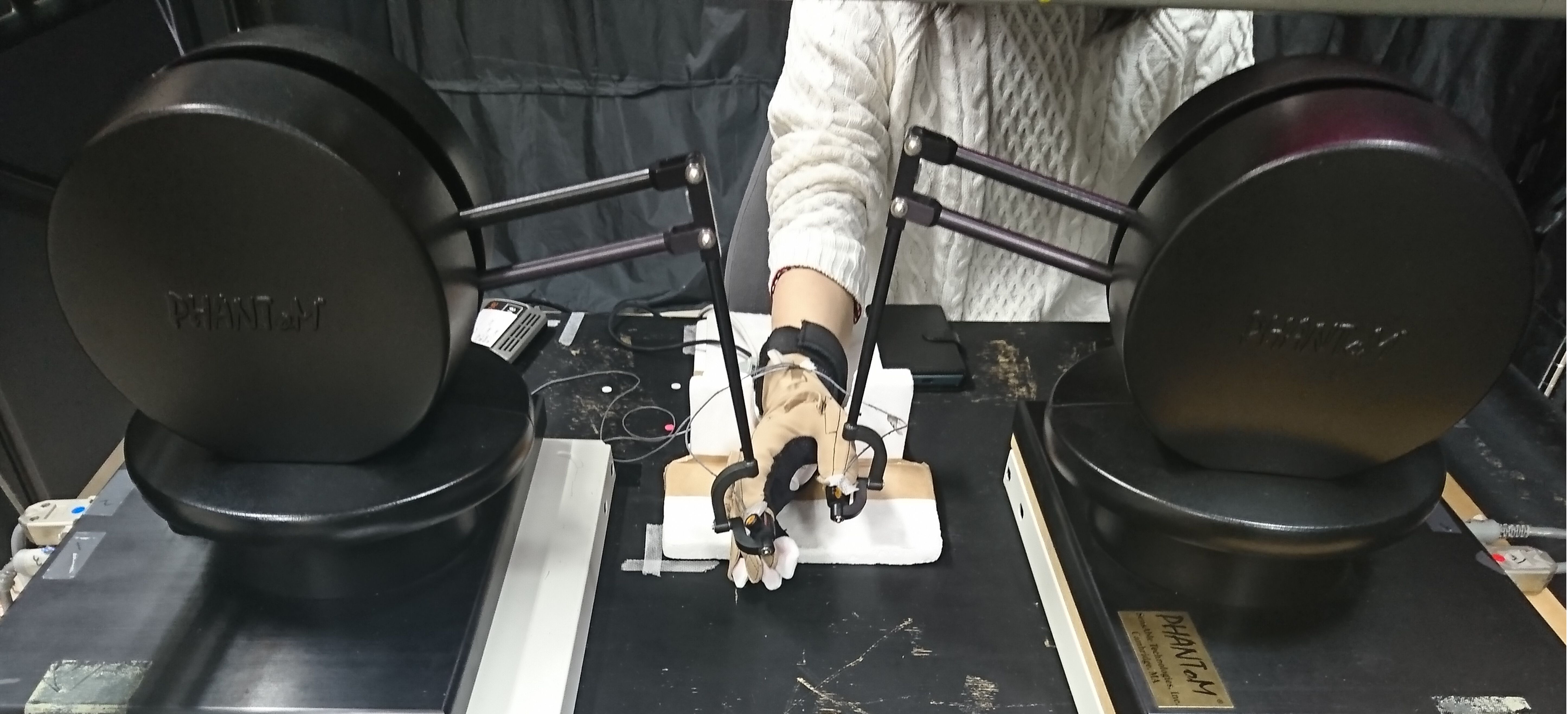
2つめの実験では,上記の実験では,被験者は自らの意思で手を動かして学習課題を実行していたが(能動条件),これに加えて力覚提示装置(PHANToM)によって指を動かすことによって学習課題を実行してもらいました(受動条件).受動条件では,自ら動かそうとしなくても力覚提示装置によって手指を動かしてくれます.
この結果,受動条件では運動主体感が低下しましたが,最大指先幅(MGA),最大把持サイズ(MGS),道具と見なすサイズには影響しませんでした.
力覚提示装置(PHANToM)による受動的運動
以上より,身体所有感は身体モデル(逆運動学モデルと順運動学モデル)の学習に関与するが,運動主体感は関与しないことを明らかにしました.
これは,自身の手だと感じているときには変形した手に対応した身体モデル(脳内の身体表現)が再学習されるが,自分の手だと感じていないときには再学習されないことを示唆しています.
さらに,身体所有感は道具と見なすサイズにも影響するが,運動主体感は影響しないことも明らかにしました(Katayama and Akimaru 2021).
仮想身体の骨格提示・光点提示と身体意識との関係
上で説明したように,ゴム手錯覚やVR空間内の仮想身体に対する錯覚について様々な条件で調べられており,
身体意識の成立には,視覚や体性感覚などの感覚情報と運動指令の遠心性コピーの時間的同期性,自己身体と人工/仮想身体との空間的一致性が重要であることが報告されています.さらに,身体所有感には自己身体と人工/仮想身体との形態的類似性も関与していることが報告されています(Tsakirisら,2010).
しかし,形態的類似性には,身体の構造(指の本数など)や外見的な特徴(皮膚の色など)の要因があると考えられますが,従来研究ではこれらの要因が混在しており,どちらの要因が関与しているかを調べていませんでした.
そこで,我々は,形態的類似性を構造的類似性と外見的類似性に分類することを提案しました(中山 片山 2020).
構造的類似性とは,身体の関節の数や配置などの身体的構造に関する類似性であり,
外見的類似性とは,皮膚表面の特徴(意図やテクスチャなど)や皮膚表面の立体的特徴などに関する類似性です.
これらの類似性を分けて調べることが重要であると主張しています.
この分類に基づいて,下の動画のように,構造的類似性は満たしているが,外見的類似性は極めて低い仮想手(骨格提示,光点提示)を使用することによって,身体意識の成立過程において,外見的類似性が必要不可欠な要因であるかどうか調べました.
この結果,仮想手の骨格提示では,課題試行の初期段階から比較的高い身体所有感となりました.一方,光点提示では,初期段階ではどちらとも言えない状態(自分の身体であるか,他人の身体であるか,どちらとも言えない)でしたが,試行を繰り返す内に身体所有感が骨格提示と同程度まで上昇しました.
従って,外見的類似性は極めて低い仮想手(骨格提示,光点提示)においても身体所有感が成立し,「自分の身体である」と錯覚するようになることが分かりました(中山 片山 2020).
つまり,外見的類似性は身体所有感の成立過程において必要不可欠な要因ではないことを明らかにすることができました.
しかしながら,外見的類似性が必要ないという訳でなく,外見的類似性が高い方がより身体所有感を感じやすくなることも事実です.
力覚と身体意識との関係
身体意識の成立には,上記のように触覚などの感覚情報も関与しています.
しかし,対象物を把持したときの指先などへの触覚に関する影響は調べられていません.
そこで,我々は,力覚提示装置(PHANToM)を2台使用して,VR空間内で対象物を把持して移動させる課題において,対象物を把持したときに力覚を提示する力覚あり条件と,力覚を与えない力覚なし条件において,身体意識を調査しました.
この結果,運動主体感に関しては両条件において差は見られなかったのですが,身体所有感に関しては力覚あり条件の方が高くなりました.つまり,対象物を把持したときに触覚や力覚を与えられたときの方がより自分の手であると感じられることが分かりました(古庄 西川 片山 2022).
仮想身体による操作課題の実行 力覚提示装置(PHANToM)による力覚提示
同時に再生してください
運動の意図と身体意識との関係
身体意識の成立には,「対象物を把持して持ち上げる」のような運動の意図も関与しているのではないかと考えました.
そこで,我々は,対象物を把持して移動する操作課題,および対象物が提示されていない状態で操作課題と同様の運動を実行するパントマイム課題(操作課題の実行のまねをする運動)について調べました.パントマイム課題では,対象物がない状態で実行しますから「対象物を把持する」という意図が無いことになります.
そこで,それぞれの課題を繰り返し実行した後に身体意識(運動主体感と身体所有感)について調査しました.
この結果,パントマイム課題では,操作課題の場合と比較して,運動主体感は若干低下する傾向が見られ,身体所有感に関しては有意に低下しました(Igarashi, Nishikawa and Katayama 2023).つまり,「対象物を把持する」という意図が無いパントマイム課題では,身体所有感が低くなり,あまり自分の手であるように感じられなかったのです.
従って,運動の意図も身体意識の成立過程に影響することが分かりました.
運動イメージによる身体意識の促進
身体意識の成立には,視覚や体性感覚などの感覚情報と運動指令の遠心性コピーが重要であることが報告されています.
一方,運動を頭の中で思い浮かべる運動イメージでは,運動を脳内でシミュレーションしていることが知られています.つまり,運動イメージをしているとき,脳内では実際に運動したときと同様の神経活動が生じているのです.
そこで,我々は,運動イメージによって身体意識を促進することができるのではないかと考えました.しかし,運動イメージでは,対象となる身体(仮想身体など)が見えていませんから,見えている身体との比較ができないため,身体意識は生起しません.
そこで,考えた基本的なアイデアは,運動イメージと同時に,イメージした運動と同じ運動の映像を観察したとき(下の動画),映像内の仮想身体に対して身体意識(運動主体感と身体所有感)が成立するではないかと考えました.
この観点から調査した結果,この試行を繰り返し実行することによって,映像内の仮想身体に対する運動主体感と身体所有感の両感覚共に促進することが明らかになりました(Makino, Sawada and Katayama 2023).
ここで大事なことは,運動イメージでは実際に運動していませんので,身体運動に関する体性感覚の感覚情報が無いと言うことです.体性感覚情報が無い状態でも,運動イメージによって身体意識が促進されたのです.
観察する手運動のビデオ(再生するとビープ音が鳴ります)
人工知能:がん陽子線治療の治療計画支援:CT画像を用いたディープラーニングによる臓器検出
がんは世界で最も死亡者数の多い病気ですが,医療技術や検査技術が進歩してきたことにより,早期に発見できれば治療可能な病気になりつつあります.
この中でも陽子線治療が重要な治療手段になっています.がんの陽子線治療では,病巣部に線量を集中して照射して治療します.このため,患部の周囲正常臓器への被爆を最小限にするために,周辺の臓器領域を正確に検出する必要があります.現状では,医師や技師が医療用画像から臓器領域を自動検出ソフト(Atlas-Based-Segmentation法)を利用して手作業で臓器領域を検出しています.しかし,CT画像では骨盤内の臓器領域が明瞭に撮影されないため,従来の画像処理方法に基づいた検出方法では正確に検出することができないため,
医師らの負担が大きくなっています.
一方,最近注目されているディープラーニング(深層学習)では,画像認識や領域検出(セマンティックセグメンテーション)などで優れた成果が数多く報告されており,医療用画像の臓器領域を検出する手法も数多く提案されています.
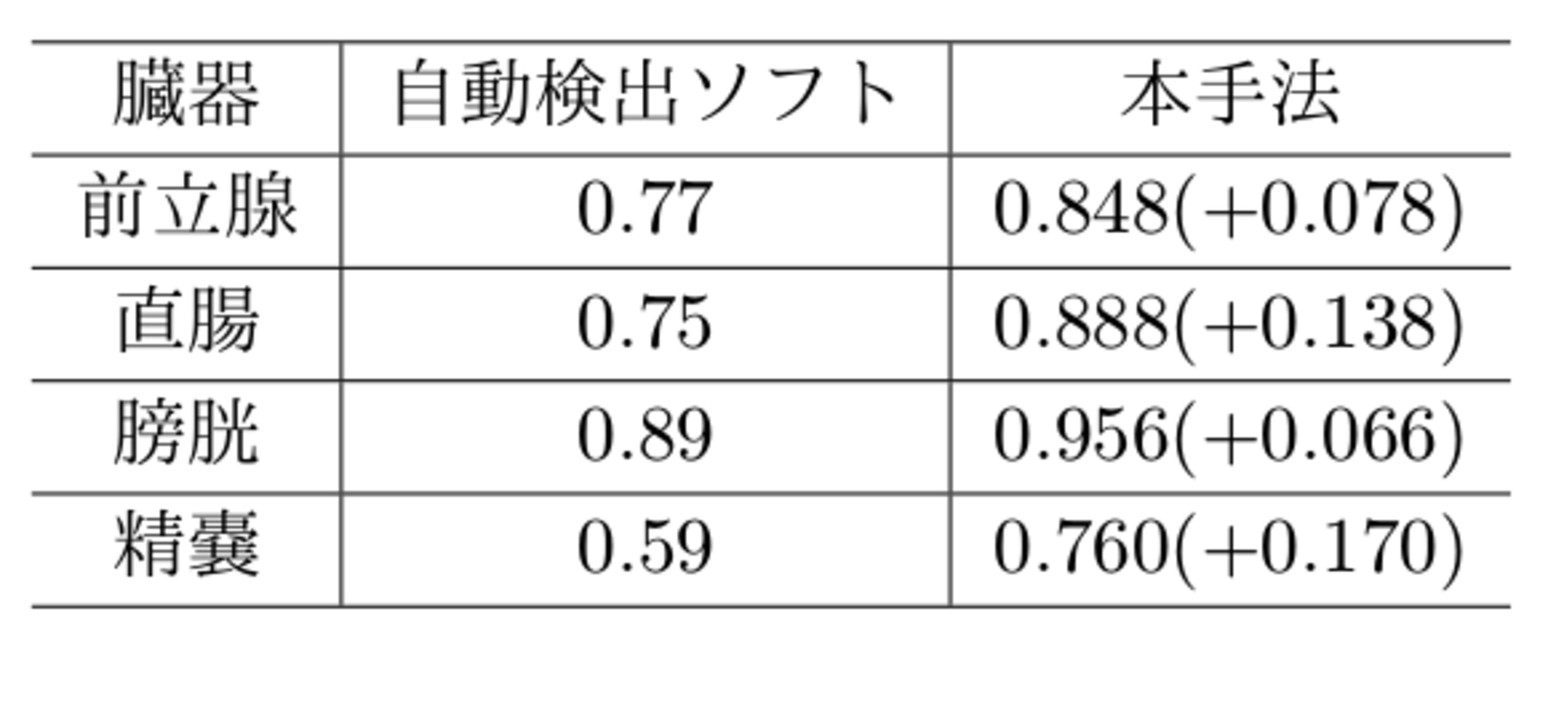
本研究では,陽子線治療の治療計画を支援することを目的として,ディープラーニング(深層学習)を用いて骨盤腔内の臓器(膀胱,精嚢,前立腺,直腸)や肝臓の腫瘍などの領域を高精度に検出するための手法を開発しています.本研究は,福井県立病院陽子線がん治療センターとの共同研究により実施しています.
福井県立病院陽子線がん治療センター(加速器と治療室の写真は同センターのWEBより)

本研究室で構築した学習用の数値計算サーバー
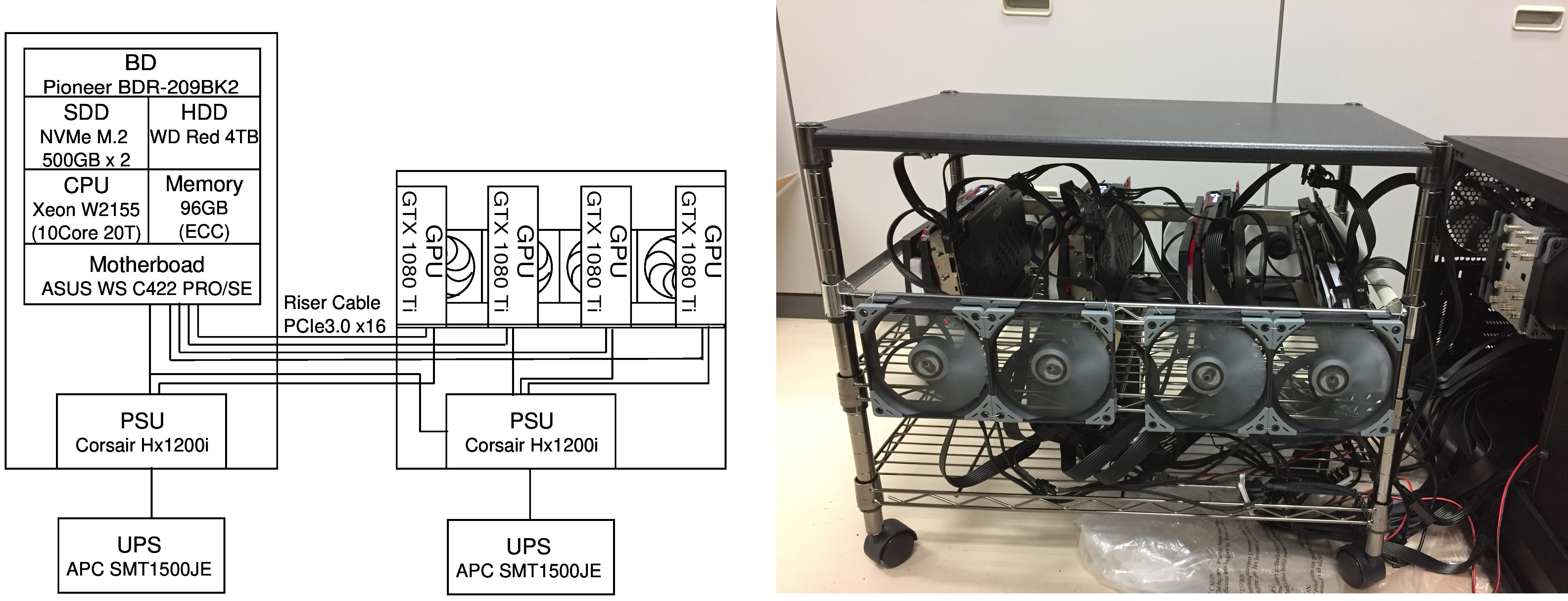
新たに構築した数値計算サーバー
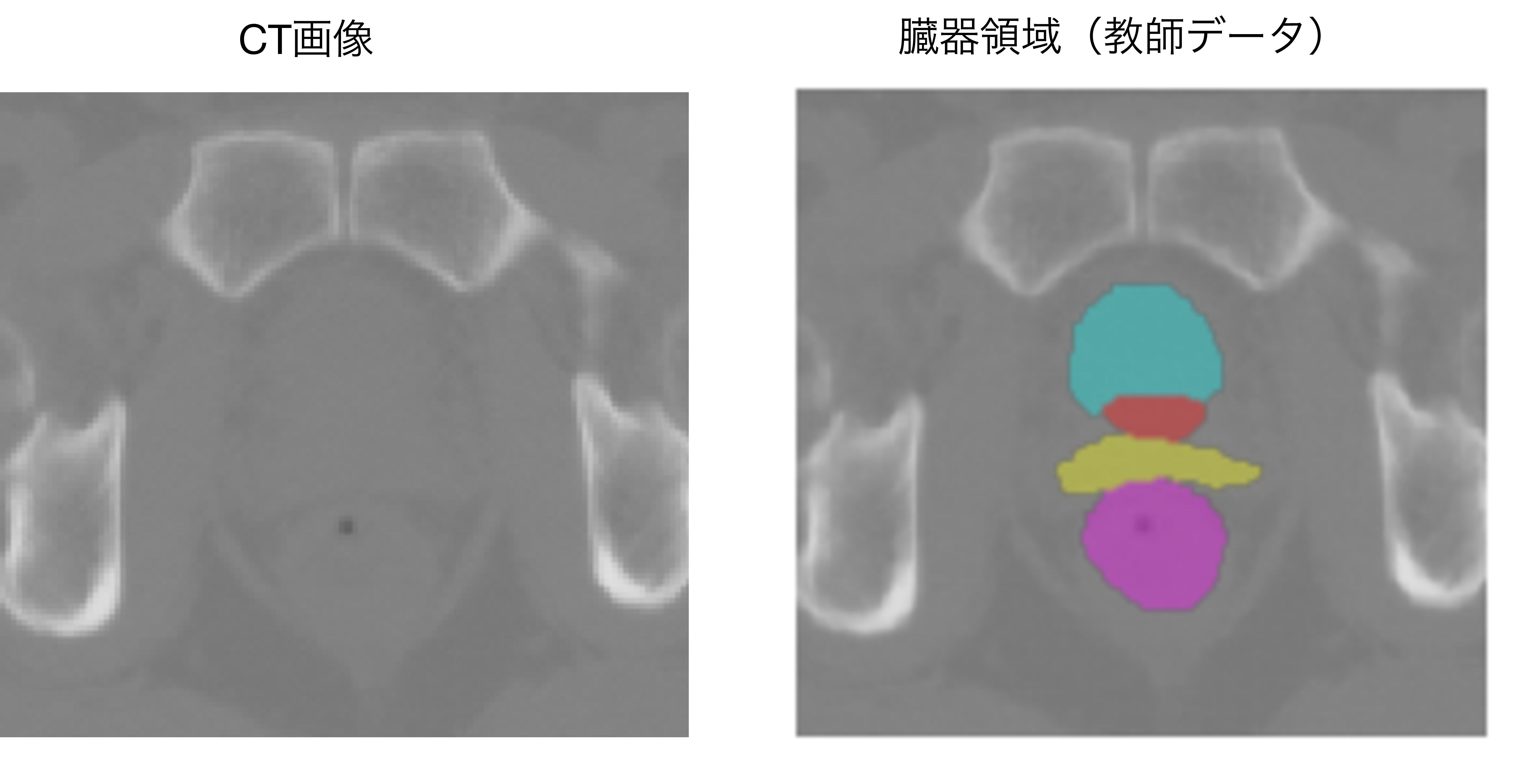
臓器領域の検出結果